POSTED: 01 Feb, 2024
Our research team from UTS and QUT has wrapped up phase 2 of the “Shorts” project with Infrabuild which involved demonstrating steel bar removal using a lightweight collaborative robot. This was an important milestone in proving that a smaller and safer robot could carry out similar work to the current operators.
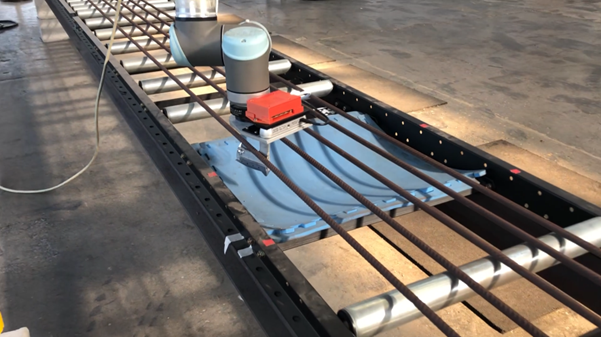

In addition, sensors placed along the bar production line in the Sydney Bar Mill have been capturing footage of short bars over several months. This comprehensive dataset of various bar types is being used to develop algorithms for automatic detection of defective short bars.


Members from Centre’s Biomimic Cobots program 1 visited Infrabuild’s Sydney Bar Mill in October last year to discuss findings from the study and to plan the next steps of the project.

The next phase of the project will see integration of the short bar detection and bar removal systems. Furthermore, key upgrades to the sensor system are underway in order to improve the detection of short bars and cover a wider range of scenarios that were learnt from the previous phase.
Another focus will be the human aspect. Understanding how a collaborative robot can integrate into existing workflows and how to best meet expectations. This will be an exciting opportunity to gain insights from workers and also for cross collaboration with other programs in the Centre.
Recent News
Meet our E.P.I.C. Researcher, Zongyuan Zhang
Zongyuan Zhang is a PhD Researcher in the Biomimic Program and is currently researching the following problem: how to use robots with a non-rigidly ...
Exploring the Realities of Cobot Adoption in Manufacturing
We’re proud to celebrate the latest publication from our research team in Futures, a leading journal by Science Direct. Congratulations to PhD resea ...
Australian Cobotics Centre Researchers Present at AOA QORF 2025 Meeting
Last week, researchers from the Australian Cobotics Centre were proud to present their work at the Australian Orthopaedic Association (AOA) Queensland ...